Computer-Implemented Means-Plus-Function Term Limited to Algorithm
In Harris Corporation v. Ericsson, Inc. (Fed. Cir. August 5, 2005), the court clarified that a computer-implemented means-plus-function clause can be limited to an algorithm, even when that algorithm is not recited in functional portion of the clause.
The claim in this case from U.S. Patent No. 4,365,338 (left) recited "a time domain processing means for simulating the time domain effect of said dispersive medium on signals transmitted through it by deducing prescribed characteristics of said medium, and for producing estimates of said information signals in accordance with a preselected relationship between said prescribed characteristics of said simulated effect and said known and received signals." The court began by noting that in WMS Gaming, Inc. v. International Game Technology, 184 F.3d 1339 (Fed. Cir. 1999), it could have relied on the function to limit the claim, but explicitly based the claim construction portion of its ruling on structure instead. WMS Gaming "rejected the argument that the corresponding structure was merely 'an algorithm executed by a computer,' holding instead that it was limited to the specific algorithm disclosed in the specification."
The [present] district court did not have the benefit of briefing on WMS Gaming, but this precedent establishes that corresponding structure of the "time domain
processing means" cannot be merely a "symbol processor," as the district court
held. The "symbol processor" construction does not incorporate any
disclosed algorithm. We hold that the corresponding structure for the "time
domain processing means" is a microprocessor programmed to carry out a two-step
algorithm in which the processor calculates generally nondiscrete estimates and
then selects the discrete value closest to each estimate.
Specifically, the patent discloses, as corresponding structure, a processor
37, "advantageously comprised of a pair of processors—a support processor (SUPP)
[37A] and a fast array processor (FAP) [37B,]" shown in Figure 4 and described
at col. 11, l. 37 – col. 12, l. 32, which is programmed to carry out the
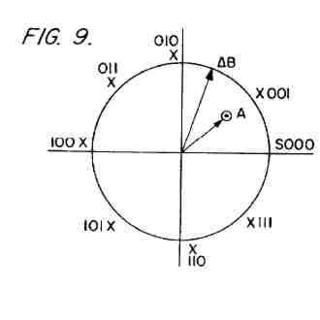
disclosed "data recovery algorithm" illustrated in Figures 8A, 8B, and 9 and
described at col. 7, l. 18 – col. 8, l. 38; col. 13, l. 45 – col. 14, l. 20; and
col. 15, l. 2 – col. 16, l. 11. Processor 37A carries out the first part of the
algorithm: calculating the effect of the medium and applying it to the received
symbols. ’338 patent, col. 15, ll. 2-6. Processor 37B "examines the . . .
estimates and compares these codes with those corresponding to the code values
capable of being transmitted." Id. col. 15, ll. 13-17. Thus, each processor
performs one of the steps.Aspects of this algorithm can vary based on implementation, as the specification implies. For example, the algorithm need not be applied to "an eight-ary PSK transmission scheme"; this is an "illustration of the effect of [the] thus-far described decision process as applied" to such a transmission scheme. Id. col. 15, ll. 27-29. The same "decision process" could be applied to another type of transmission scheme. Likewise, as Ericsson concedes, the corresponding structure of the "time domain processing means" is not limited to Equation (7) disclosed in column 8, line 30 of the patent. However, the specification characterizes the two-step process as "the col. 7, ll. 18-27. Thus, we reject Harris’s argument that the disclosed algorithm is broad enough to literally encompass one-step processes.
Figure 9 [above] illustrates how this algorithm is implemented. In Figure 9, the point labeled "A" represents the received symbol value. See id. col. 15, ll. 31-33. The point labeled "?B" represents the estimate obtained from the matrix calculations performed by processor 37A. The algorithm then involves the further step of choosing the allowed value that is closest to the estimate. In Figure 9’s example, this closest discrete value is 010. Id. col. 15, ll. 37-39.
Thus, the district court erred in holding that claims 1, 2, and 33 can cover systems that implement either a one-step or two-step process. The corresponding structure limits the "time domain processing means" to a two-step algorithm in which the processor calculates generally nondiscrete estimates and then selects the discrete value closest to each estimate, or structural equivalents thereof.
{kind=link}
{kind=link}
1 Comments:
Listen to the Harris v. Ericsson opinion on your iPod or MP3 player.
Post a Comment
<< Home
© 2004-2007 William F. Heinze